



School News
Pelican Falls robotic competition
Pelican Falls Robotics Competition Team 6339 is back from another great experience at the Robotics Competition at Western University in London, Ontario through FIRST Robotics Destination Deep Space Competition. The competition ran from April 4 to 7. The game was presented by the Boeing Corporation and space themed with robots needing to place circular objects (Hatch Panels) on a spacecraft or load Orange balls (Fuel). At the end of the game the robots had to climb onto a platform of varying heights for points.
They participated with 39 other high school teams from the surrounding area in four days of excitement, fun and a lot of challenges.
The goal of the competition is to have the robot complete as many tasks as possible in 12 matches for points with two other randomly assigned robots to your team for each match. Three robots versus three robots. To make it more of a challenge, the robots are allowed to aggressively smash and push into each other and damage the other team’s robots. In the end, the strongest robots who are able to complete challenges and score points, avoid damage, and continue working, win overall.
Before the competition each of the teams are allowed to set up a pit area with tools to work on and maintain their robot. This gives the students a chance to maintain/repair it during the fierce competition extending the learning experience.
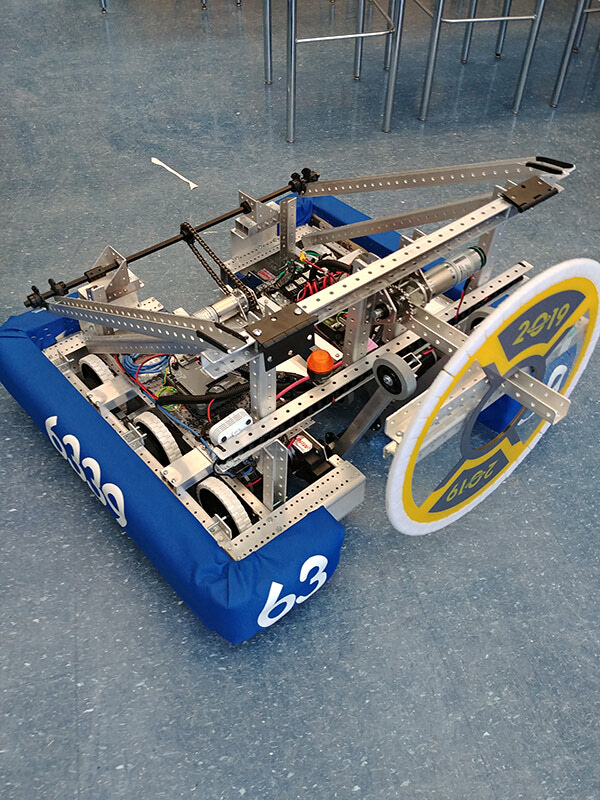
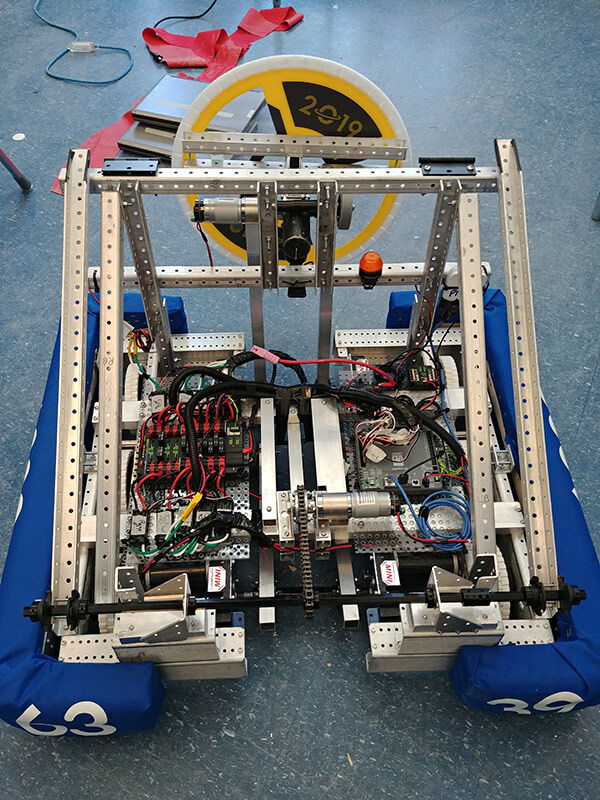
This year the student’s Robot was fitted with a lifting arm on the front to pick up and place large circular objects (Hatch Panels) and a deployable ramp from the top and bottom of their robot. This would allow another Robot to drive over them onto a higher platform for more points.
After leaving at 9 a.m. on Wednesday, we finally arrived at our hotel in London, Ontario at midnight that night. Travelling from the North is always a challenge while the other teams only have to drive 30 min.
Then, the next day, we unpacked and re-assembled the robot under a time restriction.
The day of the inspection we then had to overcome a number of challenges to modify the robot to meet the stringent inspectors’ standards, but after four hours of work in the evening, and another two hours of additional work in the early morning, we, and every one of the other 39 robots passed and were clear to enter the competition.
In our first match, the laptop that we had used for our previous four competitions at McMaster University and Durham College said it was pushed to the limit due to the extreme software demands of running and monitoring a robotics program and had a total meltdown and died during the match, stopping our robot in its tracks.
So, in half an hour, we then had to reload all of our software on our backup laptop and were able to get everything working except for our camera on the front of the robot, so we could only drive on 75% of the course that we could see with our own eyes.
Then, in our second match, after an aggressive smashing session with an opponent’s robot, our right drive wheels broke internally and came apart, gears and all spilling out onto the competition floor.
We struggled through our next two matches, only able to drive forward and to the right, until we got a two hour break in the action to fix it.
The students worked through the lunch break and replaced the entire drive gear system with working parts that we had to take from another motor in the robot, so the back deployment of our ramp was now working at less than optimal, still working, but we were back to driving.
In our next matches we had a lot of success with a once again fast, drivable robot and worked on collecting and placing large circles (Hatch Panels) onto the different parts of the game and avoided the opponent’s robots and we were very pleased to see our robot working correctly.
In the next few matches we decided it was time to push the limits again and were able to deploy our ramp motors in three separate matches to allow another robot to climb over us to a higher platform, helping our team to win more points. Unfortunately, our first teammate robot drove at an angle on our ramp and got its wheels stuck half on and half off, halfway up the ramp. On our next match, our teammate robot was driving super-fast, trying to get up our ramp before time ran out and smashed into the side of it and ripped our ramp half off of our robot. The students then worked quickly to fix the ramp for our next match in our 30 minute break. On our third time deploying the ramp in the contest our teammate robot had somehow been overlooked by the judges the day before and the clearance of their front wheels was too low for the competition and our design, so when they tried to climb our ramp, they did not have the speed or height necessary so instead they just pushed into it further, breaking our temporary fixes.
After this, our ramp was completely non-operational so we zip tied it up out of the way and went on defense for our teammates for the next four matches. Meaning we drove around aggressively smashing and disabling our opponent’s robots, which was very enjoyable for the students.
The Robot was outfitted with a four motor tank drive system (10 motors total on the Robot), a Wi-Fi router to send the signal to our laptop allowing us to control it from up to 100 feet away, a real time video camera, a lifting arm and an upper and lower deployable ramp.
Aiden McKay from Bearskin Lake First Nation, a first year Robotics Team member said, “I thought the competition was pretty cool. It was nice to see other people doing this in other schools and see how their robots looked and worked compared to us. It was nice meeting other people from different schools. I liked when we kept on going even when our robot kept getting damaged. It was awesome to see us fix it in the two hours when the wheel broke and fell off. We had to take the whole side off, found the problem, figured out the solution and then got it up and going again.”
Draven Meekis from Sandy Lake First Nation, a second year veteran of the Robotics Team felt, “That year the Robot was ready, but did not fulfill its purpose as the other teams were not successful in driving up us onto the platform. They just rammed into us and another time they got stuck on our ramp. I think our iron support bars should have been on the bottom making it flatter for the teams to drive up and it would have been easier for them to access the ramp. I think that last year’s robot, when it broke we couldn't fix it, but this years was better because it was able to complete its tasks better."
Storm Patayash from Deer Lake First Nation said, “It was a fun experience. I enjoyed seeing the other teams’ robots in action. Overall, our robot was decent enough to do its simple tasks, but did not live up to its full potential. I would have liked to see our ramp be successfully used to have a robot drive on top of us to the top platform. Next year I am looking forward to seeing what the next competition will be. I built the grabber arm on the front of the robot. I was very proud that it was the only thing that worked the whole time, even though it got bent in the first match. But it held on to the end.”
Ralph Winter from Wapekeka First Nation is a three year veteran of the Robotics Team. He said, “The team was doing great and was very amazing this year. It blew my mind. During the previous years the robot was mostly just driving and breaking easy and wasn't ever getting fixed. But this year we had a major disaster in the drive motor. The ramp and the grabber arm all received major damage, but we managed to fix them all and achieve our goal. The hardest fix was the motor drive. The team was crushed when they saw how broken it was, but I myself fixed that problem by suggesting to replace the motor drive with one of our old ones. So we took it apart to see the damage, then we found the damage, then we used one of the old motor drives to replace the broken and missing parts. We felt it all started because it was missing a C clip inside. It took us about two hours to repair and then it was finally working and picked up to the speed we wanted it to and finally was able to do its job.”
Russell Kakekagmik from Keewaywin, a first year Robotics Team member said, “I found it amazing. I was a bit shocked how many people were there. I was expecting a couple hundred but instead there were more like a thousand. I enjoyed working with the robot and seeing other robots trying to accomplish their tasks. I liked travelling to the competition. The best part for me was also the worst because it was stressful driving the robot. I found it difficult to control it based on what direction it was pointing because I couldn't really see because the camera was broken."
Elkenah Meekis from Deer Lake Treaty 5 (2370), a first year Robotics Team member said, “The whole competition was great. It was quite splendid because the robots were so cool. It would have been more cool if they were battle robots. A better tomorrow is only possible if we blow away the ashes of the past. I really enjoyed shopping, walking around and meeting new people. Our robot could have been better if we focused on defense more, because we won more when we played strategically with our other team robots."
Lee Skunk from Mishkeegogamang First Nation, a second year Robotics Team veteran felt, “Energized by the competition because we did better this year than last year. This year our robot worked way better because we had two functions, the ramp and the hatch panel lifter, which worked consistently. Even though nobody was able to drive up our ramp, it deployed correctly three times. I enjoyed getting a chance to drive the robot and being the only team member that was able to successfully place three Hatch Panels on the cargo ship."
Jules Meekis-Agnash from Deer Lake Treaty 5 (2370),a first year Robotics Team Member said, “It was very fast paced. The whole setup of the robot, the game and the repairs. It was quite amusing and frustrating. The trip was exciting and fun. The only part I didn't like was the size of the Toronto Airport; it was quite confusing. I enjoyed the city of London. There was no snow anywhere, not like up North. I think if our robot had a working camera that would have helped us a great deal.”
Jacey Kakepetum, a three year veteran of the team said, “For this year, I felt the jobs we had do were simpler during the competition because we took more turns doing each.”
Faith Bilkowski, a three year veteran of the team said, “I enjoyed the competition in London. The city was definitely less sketchier than in Hamilton last year. The part that I enjoyed most was watching the other robots trying to get up our ramp.”
Robert Docherty, PFFNHS teacher (robotics/wrestling coach)
